SDU-forsker udvikler berøringsfølsom robothud uden elektronik
Arman Goshtasbi fra SDU Soft Robotics har i sit ph.d.-projekt en blød touch-sensor, der fungerer uden elektronik på selve berøringsfladen. I stedet bruger sensoren væske i små silikonekanaler. Resultaterne blev for nylig offentliggjort i Nature Communications.
Hvis robotter skal arbejde sikkert tæt på mennesker, har de brug for mere end kameraer, motorer og algoritmer. De har også brug for en form for følesans, en slags robothud.
I dag er de fleste taktile sensorer baseret på elektronik. Men nu har Arman Goshtasbi fra SDU Soft Robotics udviklet en ny type blød touch-sensor, som fungerer uden elektronik på selve berøringsfladen.
Resultaterne er for nylig blevet offentliggjort i Nature Communications. Forskningen er støttet af Danmarks Frie Forskningsfond.
- De fleste eksisterende bløde taktile sensorer er afhængige af indlejret elektronik dér, hvor berøringen registreres. Det kan gøre systemet mere stift, mindske fleksibiliteten og gøre sensoren mere sårbar over for, at materialer løsner sig fra hinanden. Samtidig kan elektroniske komponenter påvirkes af elektromagnetisk interferens, hvilket kan begrænse deres pålidelighed i visse miljøer, siger Arman Goshtasbi.
Følesans gennem væsketryk
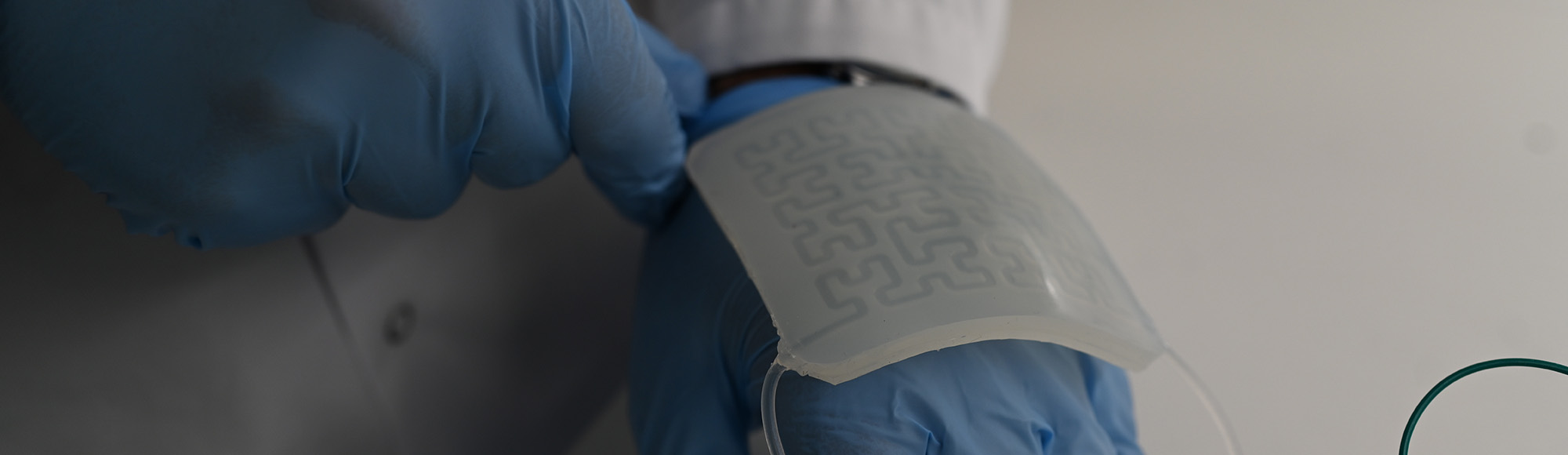
Sensoren består af en blød silikonestruktur med væskefyldte kanaler. Når overfladen berøres, forskydes væsken inde i kanalen og danner et trykmønster.
Trykmønstret ændrer sig afhængigt af, hvor sensoren berøres, og hvor hårdt der trykkes. Ved hjælp af kun to eksterne tryksensorer, som kan placeres langt fra selve berøringsfladen, kan systemet beregne både berøringens placering og kraft.
- Grundideen er, at væsken i en blød kanal danner en trykprofil, når den bløde struktur berøres. Trykprofilen varierer alt efter, hvor kontakten sker, og det gør det muligt at bestemme berøringspunktet uden at bruge et stort antal elektroniske sensorelementer, siger Arman Goshtasbi.
Arman Goshtasbi og hans kolleger har også udvidet princippet fra en simpel endimensionel sensor til en todimensionel taktil overflade. Det har de gjort ved at føre væskekanalen hen over overfladen i en såkaldt Hilbert-kurve – et matematisk mønster, der kan dække et stort areal på kompakt vis.
- Det, der overraskede mig mest, var at se, hvordan forskellige væsker skabte forskellige trykprofiler inde i kanalen, og hvor meget information man kunne trække ud af et så enkelt system. Det var bemærkelsesværdigt, at en minimal hardwareopsætning kunne levere så rige taktile data, siger Arman Goshtasbi.
Kan bruges i medicinsk robotteknologi
En mulig anvendelse af den nye sensor er i medicinsk robotteknologi, hvor der i nogle tilfælde er stærke magnetfelter.
Fordi den nye taktile sensor ikke er afhængig af elektronik dér, hvor robotten berøres, kan den give robotter en følesans uden at blive påvirket af magnetisk interferens.
Samme princip kan også være relevant under vand, hvor konventionelle elektroniske sensorer kan være vanskelige at beskytte.
Indtil videre kan sensoren registrere ét berøringspunkt ad gangen. Næste skridt er at kombinere den væskebaserede sensor med andre sensorteknologier, så systemet kan registrere mere komplekse berøringer.
- Den væsentligste begrænsning i det nuværende studie er, at sensoren lige nu kun kan registrere ét berøringspunkt ad gangen. For at overvinde den begrænsning undersøger vi sensorfusion og brugen af yderligere sensortyper, siger Arman Goshtasbi.
På længere sigt kan den nye sensorteknologi også blive relevant i en lang række andre sammenhænge.
- Jeg kan forestille mig, at det samme princip kan bruges i mange forskellige systemer og på mange forskellige skalaer, siger professor Ahmad Rafsanjani fra SDU Soft Robotics, som har været vejleder på projektet.
- Hvis vi kan miniaturisere designet yderligere og integrere hurtigere og mere effektive AI-algoritmer, kan det markant forbedre taktil sensing i for eksempel humanoide robotfingre og bærbare hjælpemiddelhandsker. Det kan gøre interaktionen med omgivelserne mere responsiv og menneskelignende.