SDU researcher develops touch-sensitive robot skin free of electronics
Arman Goshtasbi from SDU Soft Robotics has, in his PhD, developed a tactile robot skin without any electronics on the sensing site, using fluids in silicone channels. The results was recently published in Nature Communications.
If robots are to work safely around people, they need more than cameras, motors and algorithms. They also need a sense of touch, a kind of robot skin.
Today, most tactile sensors are made with electronics, but now Arman Goshtasbi from SDU Soft Robotics has developed a new type of soft tactile sensor that works without electronics at the point of contact.
The results have recently been published in Nature Communications. The project was funded by the Independent Research Fund Denmark.
- Most existing soft tactile sensors rely on embedded electronics at the sensing site. This can increase system rigidity, reduce flexibility and make the sensor more susceptible to debonding. In addition, electronic components may be affected by electromagnetic interference, which can limit their reliability in certain environments, says Arman Goshtasbi.
Touch through fluid pressure
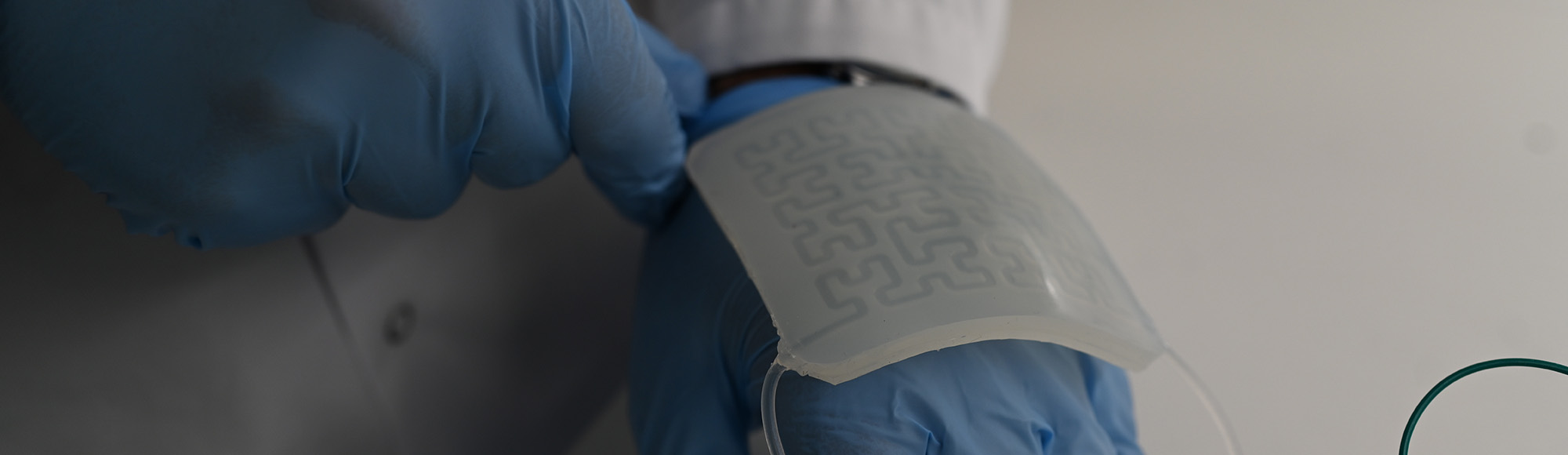
The sensor consists of a soft silicone structure with fluid-filled channels. When the surface is touched, the fluid inside the channel is displaced and creates a pressure pattern.
That pattern changes depending on where and how hard the sensor is touched. Using only two external pressure sensors, which can be placed far away from the sensing surface, the system can estimate both touch position and force.
- The basic concept is that fluid within a soft channel generates a pressure profile when the soft structure is touched. This pressure profile varies with the contact location, allowing the touch position to be estimated without relying on a large number of electronic sensing elements, says Arman Goshtasbi.
Arman Goshtasbi and his colleagues also extended the principle from a simple one-dimensional sensor to a two-dimensional tactile surface by routing the fluid channel across the surface using a so-called Hilbert curve, a mathematical pattern that can cover a large area in a compact way.
- What surprised me most was observing how different liquids produced distinct pressure profiles within the channel and how much information could be extracted from such a simple system. It was remarkable to see that a minimal hardware setup could generate rich tactile sensing data, says Arman Goshtasbi.
Useful in medical robotics
One possible application of the new sensor is medical robotics, where strong magnetic fields are sometimes present.
Because the new tactile sensor does not rely on electronics where the robot is touched, it may be able to give robots a sense of touch while remaining unaffected by magnetic interference.
The same principle may also be relevant underwater, where conventional electronic sensors can be difficult to protect.
At the moment, the sensor can detect one touch point at a time. The next step is to combine the fluid-based sensor with other sensing methods, so the system can detect more complex touch interactions.
- The main limitation of the current study is that the sensor is presently limited to detecting a single touch point at a time. To overcome this, we are investigating sensor fusion approaches and employing additional sensing modalities, says Arman Goshtasbi.
In the future, the new sensor technology could also become useful in a wide range of other applications.
- I can imagine the same principle being applied across a wide range of systems and length scales, says professor Ahmad Rafsanjani from SDU Soft Robotics, who supervised the research.
- If we can further miniaturise this design and integrate faster, more efficient AI algorithms, it could significantly enhance tactile sensing in humanoid robotic fingertips and wearable assistive gloves, enabling more responsive and human-like interactions with the environment.