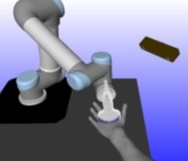
The aim of this project is to develop a robotic platform for clinical treatments. This platform will ensure repeatable and accurate treatment procedures in the hospitals. With the clinical robotic platform funded by EnergiFyn hospitals on Funen will be able to create and demonstrate how robots can be used to increase the repeatability of the diagnostics process. Hospitals on Funen will have access to a unique platform to test new ideas for clinical automation (figure 1).
This pilot project will demonstrate how to use a robotic platform in the diagnostics and evaluation of Rheumatoid Arthritis (RA) which is a chronic inflammatory disease which, if left untreated, leads to functional disability, pain, reduced quality of life and premature death. Between 0.5% and 1% of the population are affected worldwide but if the disease course is monitored closely, followed by adjustment of medication and lifestyle factors, joint destruction and development of co-morbidities such as heart disease can often be prevented.
A central part of effective monitoring of RA is joint examination, with high-resolution ultrasonography (US).
To give the best treatment strategy for patients with RA, it is necessary to be able to accurately assess the disease activity changes over time. Therefore a US RA scoring systems have been developed(figure 2).
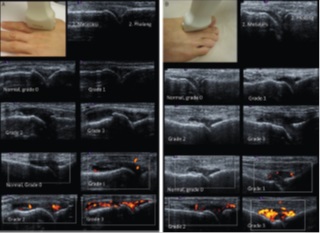
To increase the consistency of this scoring system, an atlas has recently been published, including several examples of each of the scores for a large number of joints. A reliability exercise showed that use of this atlas gave excellent reliability for real-time synovitis scoring of a large number of joints in RA patients.
However, applying this atlas based scoring method depends highly on the operator’s ability to locate the exact position for the measurement. In order to follow the progress of a specific patient, the operator has to be able to find the same location multiple times separated by months.
The robotic platform will ensure systematic and uniform method to perform ultrasound scans, thereby ensuring physicians the best possible starting point for the determination of treatment. Such systematic scanning is not possible today due to inaccuracy in human performance.
The project is funded by EnergiFyn, Denmark.
Contact:
Associate Professor Thiusius Rajeeth Savarimuthu
Project Partners:
University of Southern Denmark, Denmark; Odense University Hospital, Denmark