Two of the key principles behind Industry 4.0 (I4.0) are the ability of machines and devices to communicate with one another and the capacity of the resulting cyber-physical system to autonomously perform tasks. But how can this vision be realized? While fine-grained central planning and control clearly has merit in large-scale manufacturing, the approach is not well-suited for highly dynamic and unpredictable environments, where modern versatile collaborative robots (cobots) operate. In such environments, robots must continuously take autonomous decisions based on onboard sensor readings to carry out their task successfully and safely. Current solutions mainly rely on centralized coordination, but in this project, we want to use key ideas from the field of swarm robotics to achieve effective decentralized coordination.
Project objectives
The project has four objectives:- Perception: enable robots with limited onboard sensing capabilities to assess the situational context with sufficient accuracy to carry out tasks efficiently and safely in complex I4.0 environments.
- Coordination: give robots, potentially with a heterogeneous set of capabilities, the capacity to cooperate on tasks that require multiple steps (e.g., manipulation, transportation, and assembly tasks) in highly dynamic environments.
- Control: develop methods for automatic design of decentralized control for robots in an I4.0 context.
- Validation: conduct a case study in a realistic I4.0 scenario.

Project method; Focus on embodiment
Swarm robotics is an approach to the decentralized coordination of large multirobot systems. In this approach, there is a focus on embodiment, where robots communicate locally with one another, either explicitly or through modification of the environment. By following the core principles of individual autonomy, decentralized coordination, and self-organization, swarm robotics systems can achieve a high degree of scalability, flexibility, and robustness.
New approach will enable swarm robotics to I4.0
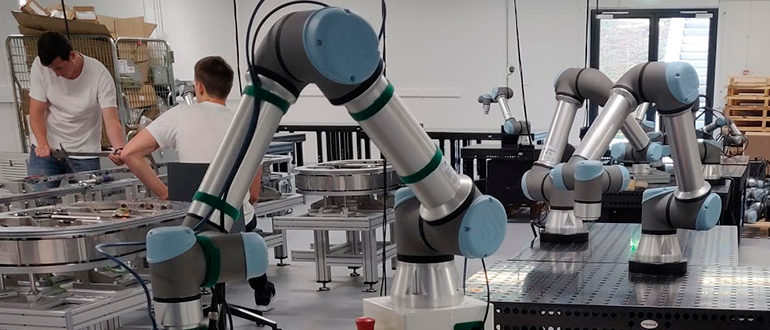
We will develop new approaches to perception, coordination and control design that enable the application of swarm robotics to I4.0. The main difference with respect to existing research approaches to decentralized coordination in manufacturing is the focus on embodied robots rather than software agents. The main difference with respect to existing research in swarm robotics is the increased complexity of the I4.0 environment, robots, and tasks. Throughout the project, we will conduct experiments in SDU’s unique I4.0 lab, where we have access to state-of-the-art infrastructure and robots (including UR arms, MiRs, and Enabled Robotics platforms), a tracking system, an intelligent warehouse, among others.
Future perspectives; Autonomous cooperation
We envision a future in which centralized planning is limited to high-level decision-making, and where robots use swarm robotics to coordinate and cooperate locally. In such scenarios, mobile platforms would, for example, be able to autonomously cooperate with one another to optimize transport of components, they would be able to locally cooperate with robot arms to load and unload payload, and co-located robot arms would autonomously decide when to work together on the same task and when to work in parallel, based on the local situational context.
Partners
![]()
IRIDIA, Université Libre de Bruxelles
![]()
Funded by
Independent Research Fund Denmark (Danmarks Frie Forskningsfond)
Project period
December 2020-March 2024