Oral Sensors
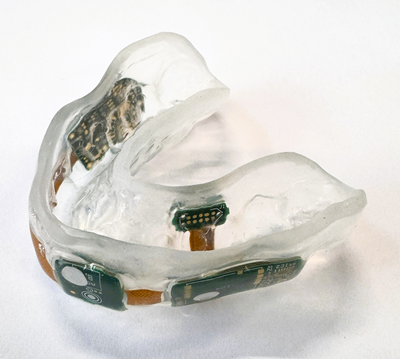
There is a great need in the contact-sport community to show that athletes are supported to safely participate in physical activity. Mental and physical fatigue are liked with decrease in performance and increase and injury rate. As fatigue can be linked to physiological factors, a system has been developed that incorporates novel technology to record and analyse physiological performance data. This project focuses on the development of oral cavity sensors that could generate novel data streams across a group of athletes. The device can be worn as a mouthguard to measure player performance, overtraining signs and potential injury risk.
For more information, contact: Jeroen Bergmann, Joseph Russell, Leonardo de Almeida e Bueno
CAT&MAUS – Ultrasound-Based Measurement of Joint Motion
CAT&MAUS (Computer-Aided Tracking and Motion A
nalysis with Ultrasound) is a system designed to measure the three-dimensional motion of bones and joints using standard ultrasound imaging. The aim is to enable practical, radiation-free assessment of skeletal motion in clinical settings and improve the evaluation of joint mechanics in orthopaedic practice. Clinical development and validation of the system is currently supported by an NIHR Product Development Award.
Key collaborators
Dr Jack Tu – NDORMS, University of Oxford
Dr Simon Abram – University of Bristol
Prof David Murray – NDORMS, University of Oxford
For more information, contact: Stephen Mellon
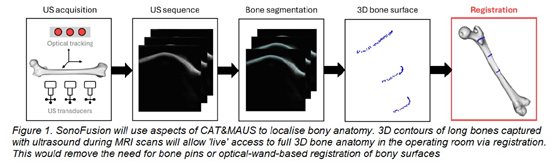
SonoFusion – Dynamic Multimodal Imaging of Joint Mechanics
SonoFusion explores how tracked ultrasound can be combined with cross-sectional imaging such as MRI to generate dynamic visualisations of bones and soft tissues during movement. The project aims to link high-resolution anatomical imaging with motion information derived from ultrasound.
A key clinical application is femoroacetabular impingement syndrome, where the interaction between hip morphology and movement can lead to pain and joint damage.
Key collaborators
Prof Siôn Glyn-Jones – NDORMS, University of Oxford
Prof Amy Zavatsky – Dept. of Engineering Science, University of Oxford
For more information, contact: Stephen Mellon
Women’s and Paediatric Health
Women’s healthcare often relies on male-derived data, while paediatric care depends on scaled-down versions of adult interventions. These approaches overlook key anatomical, physiological, and biomechanical differences, limiting mechanistic understanding and resulting in poorly suited solutions.
This research addresses these challenges through a need-led approach focused on biomechanics in women’s and paediatric health. Current areas of interest include:
(1) Research on improving solutions for urine collection, for pre-continent children
(2) Research on the development of support devices for pelvic organ prolapse (POP) that adapt to anatomical variation and disease presentation.
(3) Biomechanics research, with an emphasis on the understanding of underlying mechanisms that increase the risk of certain injuries and conditions in women
(4) Research on shape shifting materials and biomedical applications.
Together, these research areas generate shared biomechanical and functional insights that inform the design of adaptable, user-centred biomedical technologies for women and children.
 Intent Sensing for Control of Assistive Devices
Intent Sensing for Control of Assistive Devices
Millions of people across the world live with physical disabilities, and assistive robotics are being widely researched to help them complete their activities of daily living. However, to be truly helpful, a device has to be able to understand what it is that you want to do, and ideally, what you are going to do next.
This project therefore focuses on networking wearable and non-wearable sensors with machine learning to predict your intent, and then using this to control a collaborative robot, leveraging automation to promote patient independence while keeping the human in the driving seat.
For more information, contact: Joseph Russell
DANARC Project
As the global population ages, cardiovascular diseases will substantially increase healthcare costs and intensify the demand for timely diagnosis and treatment. Echocardiography has become a critical first-line diagnostic tool in the management of cardiovascular disease. The DANARC initiative addresses this gap by integrating artificial intelligence and robotic technologies seeking to revolutionize cardiovascular diagnostics through the development of an autonomous AI-powered echocardiography robot. This innovative robotic system intends to independently acquire cardiac ultrasound images using AI-driven imaging guidance without requiring a human operator, significantly reducing waiting times and increasing access to cardiac care.
For more information, contact: Jeroen Bergmann, Leonardo de Almeida e Bueno
Dental Robotics
Digital scanning is now widely used in dentistry. It allows dentists to capture precise 3D images of patients’ teeth with both improved accuracy and patient comfort. These scanners have become a standard tool. The next major step is automating the scanning process itself for even greater consistency. Automation could make dental scans faster and more uniform, whilst freeing up dentists to focus on patient care. This project aims to develop a novel dental scanning robot.
For more information, contact: Jeroen Bergmann, Mehrnosh Tavakoli Dinani
Outcomes of the Oxford Unicompartmental Knee Replacement
This research investigates factors that influence outcomes following Oxford Unicompartmental Knee Replacement, one of the most widely used partial knee replacement systems. The work combines medical imaging, biomechanical analysis, and machine learning methods to identify patterns associated with implant performance and patient outcomes.
Key collaborators
Prof David Murray – NDORMS, University of Oxford
Dr Jack Tu – NDORMS, University of Oxford
For more information, contact: Stephen Mellon, Monica Armengol
Infrastructure-Free Surgical Navigation
This project explores new approaches to tracking surgical instruments and anatomy without external tracking infrastructure. By combining computer vision, robotics, and biomechanical modelling, the work aims to develop navigation technologies that are easier to deploy in routine orthopaedic surgery.
Key collaborators
Prof Maurice Fallon – Oxford Robotics Institute, University of Oxford
Prof David Murray – NDORMS, University of Oxford
For more information, contact: Stephen Mellon
Human Localisation Through Motion Analysis
To predict your current and future intent, it is useful to know where you are, as you are most likely to interact with objects that are near you. This is not a solved problem in research, and typically relies on the use of cameras, proximity sensors and other devices that may not always be viable in the space you are in. This project uses wearable inertial measurement units, i.e. in a smart watch, to track your motion, and then employs a particle filter to simulate thousands of possible positions you could be in, discard those that are physically and biologically inconsistent, and then average those that remain. This provides an estimate of your position in a space that can be used for intent prediction.For more information, contact: Joseph Russell