Embodied Neurorobotics
A research area at SDU Biorobotics
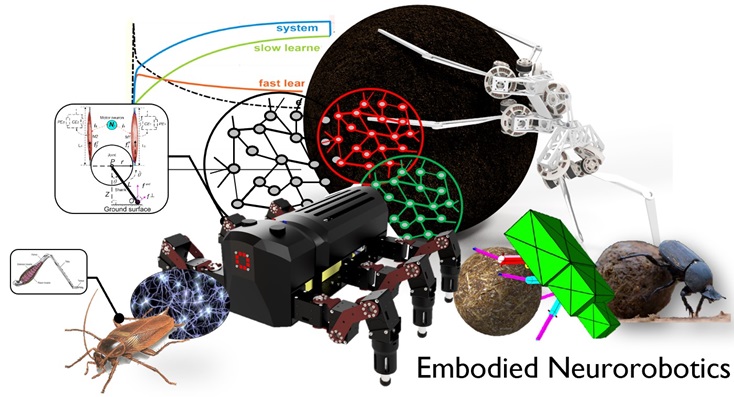
Living creatures, like walking animals, impress the observer by the elegance of their locomotion. They can also continuously learn and quickly adapt to new situations or solve specific tasks. They can even exploit their morphology to perform diverse complex autonomous behaviors, such as locomotion, object manipulation and transportation, and navigation, with a high degree of energy efficiency.
To achieve such complex behaviors for artificial walking systems, we focus on the Embodied Neurorobotics approach [1]. The approach not only (i) considers an integration of neural systems, body, and the environment , but also (ii) focuses on the detailed dynamical interactions of the neural computation (i.e., activity, plasticity, and memory at different time scales [2-4]) with the environment to realize and generalize complex autonomous behaviors. By doing so, we aim to understand the complex dynamical interactions between physical and computational components in embodied neural closed-loop systems.
Finally, we transfer our knowledge and development to other systems [5], such a soft magnetic robots, service robots and exoskeletons, as well as to other application areas, such as service, construction, inspection, transportation, search and rescue, planetary exploration, and agriculture.
References
[1] Manoonpong, P. and Tetzlaff, C. (2018) Editorial: Neural Computation in Embodied Closed-Loop Systems for the Generation of Complex Behavior: From Biology to Technology. Front. Neurorobot. 12:53. doi: 10.3389/fnbot.2018.00053
[2] Thor, M., Manoonpong, P. Versatile modular neural locomotion control with fast learning. Nat Mach Intell 4, 169–179 (2022). https://doi.org/10.1038/s42256-022-00444-0
[3] Larsen, A.D., Büscher, T.H., Chuthong, T., Pairam, T., Bethge, H., Gorb, S.N. and Manoonpong, P., 2023. Self‐Organized Stick Insect‐Like Locomotion under Decentralized Adaptive Neural Control: From Biological Investigation to Robot Simulation. Advanced Theory and Simulations, 6(8), p.2300228
[4] Xiong, X. and Manoonpong, P., 2021. No need for landmarks: an embodied neural controller for robust insect-like navigation behaviors. IEEE Transactions on Cybernetics, 52(12), pp.12893-12904.
[5] Pequeño-Zurro, A., Ignasov, J., Ramírez, E.R., Haarslev, F., Juel, W.K., Bodenhagen, L., Krüger, N., Shaikh, D., Rañó, I. and Manoonpong, P., 2023. Proactive Control for Online Individual User Adaptation in a Welfare Robot Guidance Scenario: Toward Supporting Elderly People. IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 53, no. 6, pp. 3364-3376
Explore other research areas
Last Updated 22.05.2025