Bio-inspired robotics
A research area at SDU Biorobotics
Bio-inspired legged robots have flexibility of movement as well as versatility and agility. However, controlling them to reach the performance of living creatures remains a challenging task. To address this, we have developed generic adaptive neural mechanisms based on a modular structure for bio-inspired legged robots. The mechanisms, including neural control, memory, and learning, integrate five important neural aspects:
- Neuromechanical control (neural locomotion control with muscle model)
- Adaptive forward models (efferent copy)
- Short-term memory
- Multiple time scales of learning and synaptic plasticity (long-term memory)
- Predictive (anticipatory) control.
The neural integration can generate complex bio-inspired behaviors with online adaptation in physical autonomous robots. This development provides flexible, transferable neural solutions also to other systems (e.g., a snake-like robot, orthosis, and exoskeleton systems, and drones) and gives a better understanding of the general control, memory, plasticity, and predictive principles in embodied neural sensorimotor function for complex behaviors.
In addition to this, we have recently proposed an adaptive neural central pattern generator (CPG) model with error-based dual integral learning for fast online frequency adaptation. The adaptive CPG model can autonomously generate a proper frequency to control periodic movements of legged robots, soft robots, as well as robot arms and quickly adapt their movements to deal with changing environments within a few seconds. We have also recently introduced a general distributed neural CPG-based control architecture with online sensory adaptation for self-organized locomotion and fast adaptation to damage of bio-inspired multi-legged robots (like insects, millipedes, centipedes).
Current work
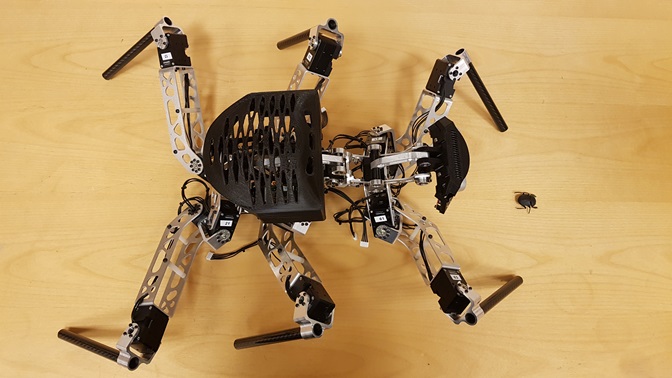
Inspired by the African ball-rolling dung beetle, we have developed the multifunctional dung-beetle inspired robot, ALPHA. Due to the novel dung beetle-inspired structural design inspired by the dung beetle species Scarabaeus Galenus, the robot morphology allows for complex behaviors, like walking, manipulating (rolling) different ball sizes, and transporting the balls using its legs, like the dung beetle.
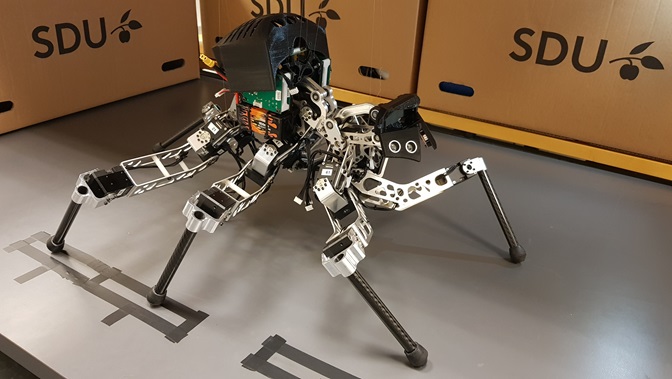
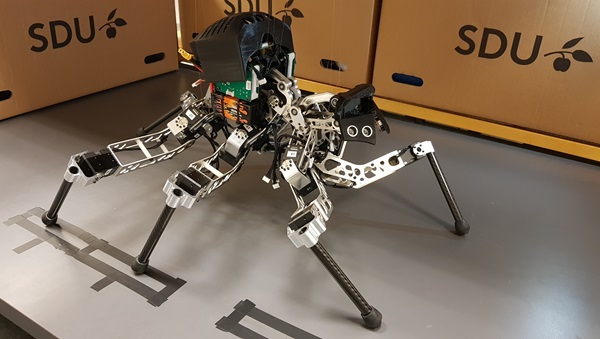
Besides ALPHA, we have also developed the insect-inspired robot MORF - Modular Robot Framework, which can crawl on six legs but with just a few adjustments, can be converted into a mammal with four legs. Its structure is flexible and can be used for re-configuring, extending, and/or replacing parts to obtain different features for investigating embodied neural locomotion control.

These robots are used as our experimental platforms to develop adaptive (embodied) neural mechanisms and test new hypotheses in biological research.
Bio-inspired legged robots have flexibility of movement as well as versatility and agility. However, controlling them to reach the performance of living creatures remains a challenging task. To address this, we have developed generic adaptive neural mechanisms based on a modular structure for bio-inspired legged robots. The mechanisms, including neural control, memory, and learning, integrate five important neural aspects:
- Neuromechanical control (neural locomotion control with muscle model)
- Adaptive forward models (efferent copy)
- Short-term memory
- Multiple time scales of learning and synaptic plasticity (long-term memory)
- Predictive (anticipatory) control.
The neural integration can generate complex bio-inspired behaviors with online adaptation in physical autonomous robots. This development provides flexible, transferable neural solutions also to other systems (e.g., a snake-like robot, orthosis, and exoskeleton systems, and drones) and gives a better understanding of the general control, memory, plasticity, and predictive principles in embodied neural sensorimotor function for complex behaviors.
In addition to this, we have recently proposed an adaptive neural central pattern generator (CPG) model with error-based dual integral learning for fast online frequency adaptation. The adaptive CPG model can autonomously generate a proper frequency to control periodic movements of legged robots, soft robots, as well as robot arms and quickly adapt their movements to deal with changing environments within a few seconds. We have also recently introduced a general distributed neural CPG-based control architecture with online sensory adaptation for self-organized locomotion and fast adaptation to damage of bio-inspired multi-legged robots (like insects, millipedes, centipedes).
Future work
To generate complex robot skills with autonomous decision making (i.e., motion intelligence) for solving unexpected situations and dynamically changing environments, we will investigate a new type of robot morphology (e.g., hybrid rigid-soft bio-inspired robot body) and different bio-inspired machine learning and optimization methods. The methods are based on exploiting neural dynamics, learning, memory, and plasticity principles and learning at different time scales.
We will also investigate a new bio-inspired technology, emerging from Bio-inspired Robotics, Embodied AI, Neurorobotics, Soft Robotics, and Machine Learning, for intelligent motions of soft robots and soft/safe human-robot interactions. Some of the key topics that we will address include soft human-exoskeleton interaction in rehabilitation, safe human-drone interaction in autonomous inspection and transportation, and soft/safe human-robot interaction as well as collaboration in industrial tasks.
Last Updated 22.05.2025