The purpose of this research is to establish a library of robotic surgical procedures. Patient safety and reducing medical errors have a high priority in today’s health systems. Unskilled, up-coming surgeons can no longer train in vivo and within the field of laparoscopy there is an increased focus on new training strategies, including Virtual Reality (VR) simulator training. Robotic assisted surgery allows an increasing part of abdominal and retroperitoneal surgical procedures to be performed as minimal invasive techniques. Therefore, the demand for simulation skill trainings increases. However, simulating realistic soft tissue interactions is technically difficult. The present commercial simulators for surgical training focus on simple training scenarios where only few parts of soft tissue can be simulated at a given time. Complex simulations (i.e. advanced operations) are not available and this limits the benefits obtained with the present available simulation programs for minimal invasive surgery (MIS).
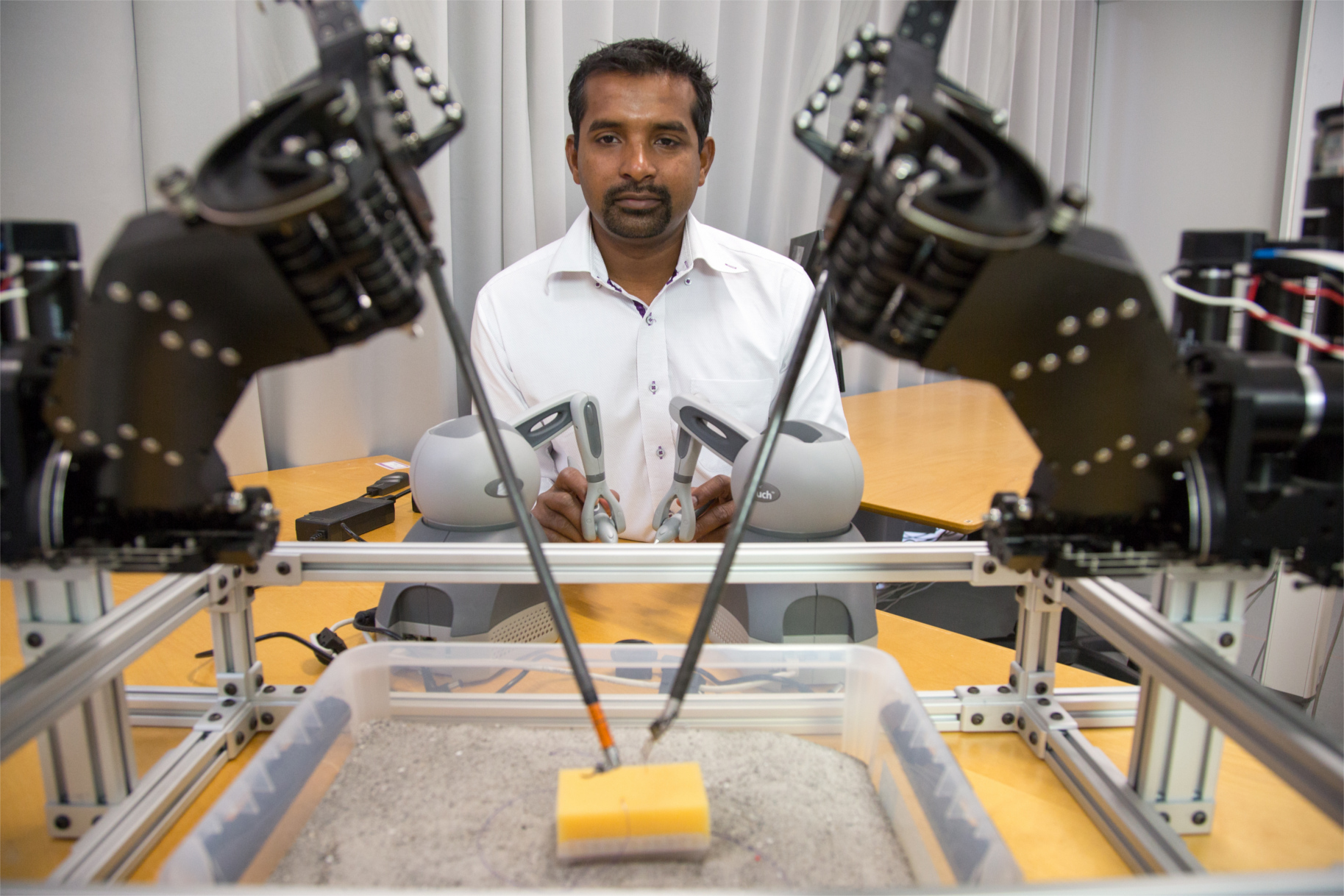
The Raven Surgical Robot (RSR) is a research robot used to imitate MIS. The RSR gives researchers full access to movement, manipulation and kinematic data and control software which is necessary for analysing performance data. This data is not available in commercial surgical robotic systems such as the da Vinci robot. The RSR comes with a simulator that can be programmed by the researches in this project. The RSR enables transference of video sequences of real time operations to the simulation and vice versa by mimicking both hardware and software functionalities to the da Vinci Robot.
Initially dynamic models of the Raven system and interfaces for controlling the simulator of the Raven system will be implemented. The simulator will then be used in training procedures for intermediate and skilled robotic urological-, abdominal-, and gynaecological surgeons in simulation programs. Data from surgical procedures will be recorded and used to identify and describe subtasks as actions according to the action library format. The development of this simulator will provide young surgeons with a new and improved training platform that can move simulation training from currently being motor skill training to surgical task training. The overall purpose is to develop surgical task training programs so that operation can be trained the day before it is performed in the patient. The performance of the simulation can then be played back as picture-in-picture or overlay during the actual operation.
Contact:
Professor Thiusius Rajeeth Savarimuthu
Project Partners:
University of Southern Denmark, Denmark; Odense University Hospital, Denmark