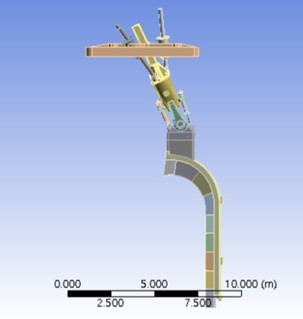
The work by SDU Robotics in EUROfusion is on remote maintenance of fusion reactors; specifically in connection with the fusion power plant build for DEMO. To maximise the overall availability of fusion power plants, it is pivotal that maintenance can be completed safely and effectively. Remote maintenance includes numerous tasks, including breeder blanket extraction that is part of the in-vessel maintenance. The extraction of breeder blankets is complicated as it involves motion of large deformable structures in tight spaces by robots that deform under the large load.
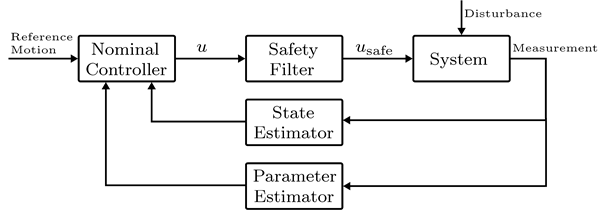
SDU Robotics is developing safe adaptive control algorithms for remote maintenance that involves loads and robots that deform. The developed control algorithms are adaptive to cope with partially unknown structural parameters; in addition, formal guarantees are provided for the safety of the system despite uncertainty in the system model. A conceptual diagram of the developed control system is shown below.
This work has been carried out within the framework of the EUROfusion Consortium, funded by the European Union via the Euratom Research and Training Programme (Grant Agreement No 101052200 — EUROfusion). Views and opinions expressed are however those of the author(s) only and do not necessarily reflect those of the European Union or the European Commission. Neither the European Union nor the European Commission can be held responsible for them.
Contact:
Associate Professor Christoffer Sloth
![]()