
Being released in 2010, the TurtleBot is a comparatively new robotic concept. It’s actually not even a robot, but a robot kit based on Open Source software. Most of its components are standard hardware that can be bought elsewhere. The idea of TurtleBot inventors Melonee Wise and Tully Foote was as simple as brilliant: They realized that no readymade single robot would ever be flexible enough for many robot enthusiasts. This target group traditionally likes to customize robots for specific usage scenarios.
But even the most dedicated robot enthusiasts appreciate a working concept to build upon. Even simple robots have nowadays a high degree of complexity. Consequently, it is very handy if you don’t have to tinker every single nut and bolt in a robot project yourself. Not to mention the notorious complex software controls.
The TurtleBot combines both aspects, because it, on the one hand, provides a working concept with ready-made components and, on the other hand, gives any user the full range of expandability that is typical for Open Source applications.
Using the Robot in the HRI-lab
The TurtleBot 2 had been used as a robotic platform for the SMOOTH-project. SMOOTH is a large scale project for the development of a care robot for old people. The HRI-lab developed a prototype based on TurtleBot 2 and studied the interaction between prototype and test participants. In an interview, Rosalyn Melissa Langedijk gives a insight into SMOOTH, the research methodology and the TurtleBot 2 used for the project.
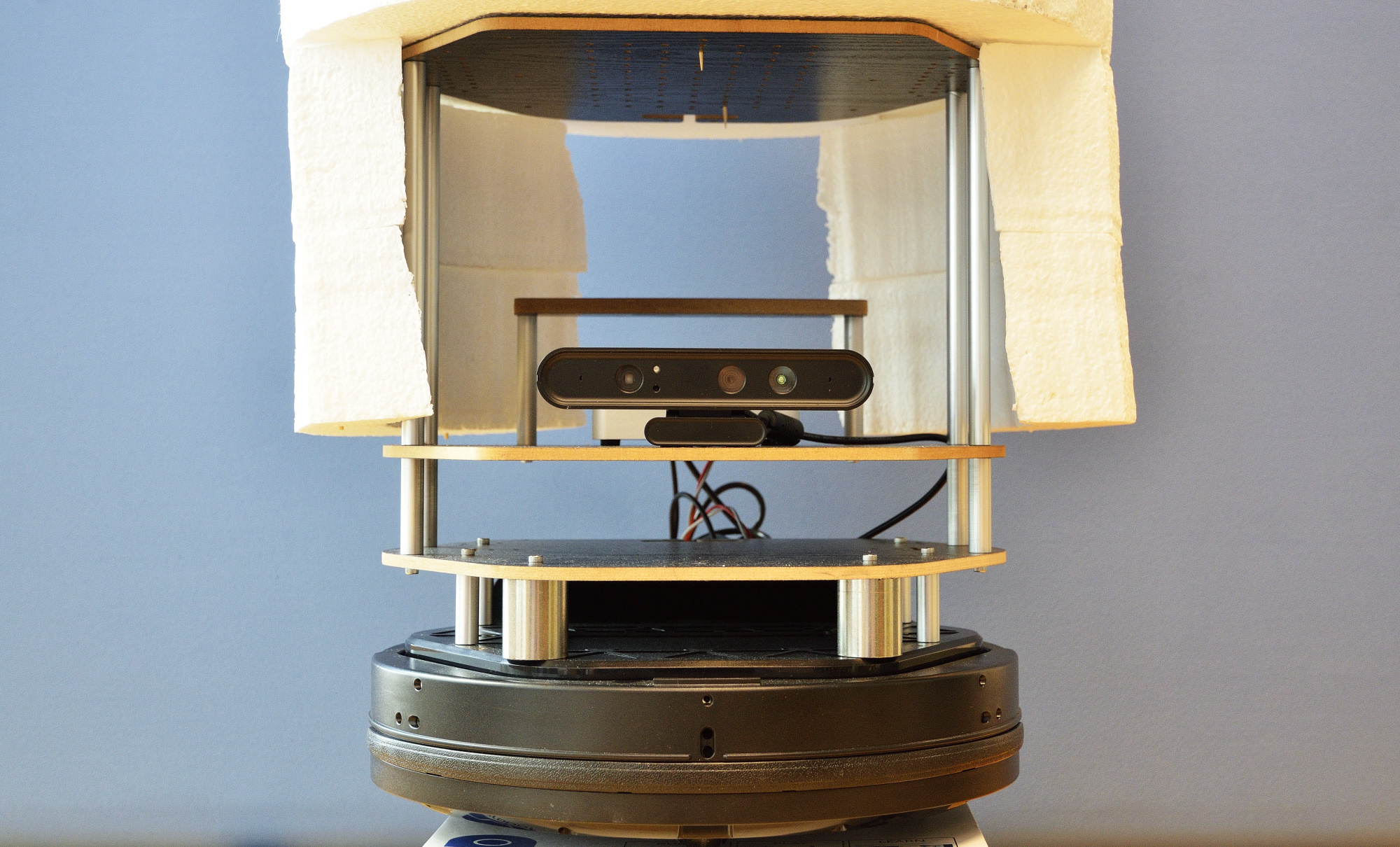
We added a styrofoam top on TurtleBot 2 to create the robot prototype Casper for SMOOTH project.
Robot Hardware
TurtleBot 2 is based on standard hardware. Its core component is a mobile base called Kobuki which is manufactured by the South Korean company Yujinrobot. The base provides basic robot functionality like an IR-sensor and various sensors for motion. These are bump sensors, cliff sensors and wheel sensors and even a 3D sensor for navigation. With the help of this battery of sensors, the robot is suited for navigation even in difficult terrain.
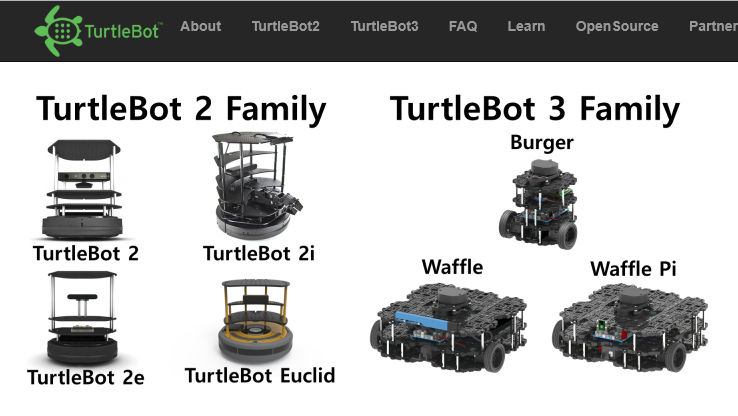
All TurtleBot versions are highly customizable to personal needs. (Screenshot taken from manufacturer's website)
The firmware of the Kobuki base is upgradeable and it offers various interfaces like a USB port, power connectors and even an old fashioned serial interface. It may seem outdated to use a serial interface in the times of USB 3.0 and Thunderbolt, but the serial interface is comparably easy to program and for this reason still very popular in the maker scene. Status LEDs of the Kobuki base are programmable, a battery status LED gives feedback about remaining battery capacity.
Our TurtleBot 2 is controlled by an Intel NUC mini computer that is mounted on the mobile base. Any other computer, like a laptop or a netbook, would work as well. The use of standard mobile computer hardware gives the concept a wide range of expandability as additional components like e.g. a webcam, speakers or microphones can easily be attached to the TurtleBot.
Interaction with Humans
The TurtleBot 2 is neither a humanoid robot nor a cuddly toy robot like a PLEO rb but it is nonetheless well adapted to interact with humans. The standard version of the TurtleBot 2 has no robotic arm, the only motion that it is capable to perform is to move on flat terrain. But due to the integrated computer, it is able to speak and to listen to environmental sounds. And this is the strong part of the concept. Spoken interaction can be completely customized for individual needs. By using standard computer hardware for the controls, the user has access to a wide range of applications.