Forløbet handler om at programmere en VEX-robot til at køre i en cirkel ved hjælp af data om hjulenes dimensioner, omdrejningshastigheder og afstanden mellem hjulene.
Eleverne arbejder praktisk med at udvikle funktionsforskrifter og undersøge sammenhængen mellem radius, omkreds og hastighedsforhold. Samtidig opbygger de en teoretisk forståelse af, hvordan matematiske modeller kan anvendes til at beskrive og styre bevægelse. Gennem arbejdet træner eleverne teknologisk innovation i en systematisk og iterativ produktudviklingsproces, hvor de lærer at bruge matematisk modelleringskompetence i praksis og behandle problemstillinger i samspil med andre fag.
Undervejs får de indsigt i robotprogrammering og erfaring med at opstille og anvende funktionsudtryk, hvilket giver dem forståelse for koblingen mellem geometri, hastighed og praktisk robotstyring.
Fremgangsmåde
Iscenesættelse
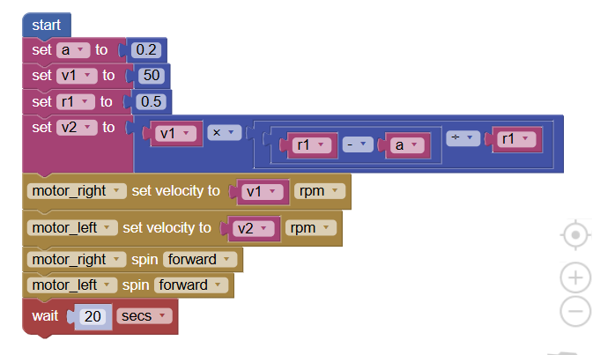
Eleverne bliver præsenteret for opgaven at programmere en VEX-robot til at køre i en cirkel. Som en del af introduktionen får de indblik i det praktiske scenarie og en fælles introduktion til blokprogrammering i Robot Mesh. Målet er at give eleverne en klar ramme for, hvad de skal udforske, og hvilke matematiske og teknologiske begreber der bliver centrale i forløbet.
Handlingsfase
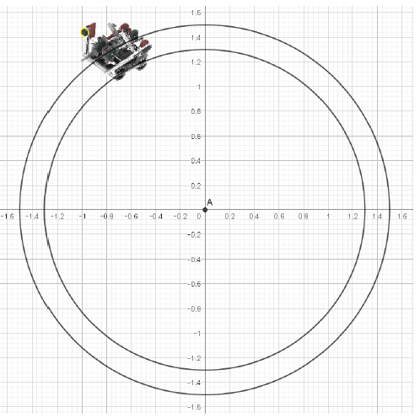
Eleverne arbejder med at beregne hjulenes omkreds, cirklens omkreds og radius og med at udvikle funktionsforskrifter for hastigheder. De opstiller matematiske modeller, der beskriver sammenhængen mellem radius og hjulenes omdrejningshastigheder, og afprøver deres modeller ved at lade robotten køre på en bane på gulvet. Som afslutning får de en ny bane, som de ikke kender på forhånd, og skal anvende deres opstillede modeller til at navigere robotten igennem. Fokus er her på at bruge matematiske modeller aktivt i programmeringen frem for blot at arbejde med trial-and-error.