Focus areas
Our research in Drone Intrastructure Inspection and Interaction group is focused on the following areas
 Onboard Processing
Onboard Processing
The aim is to build an autonomous navigation system for drones that relies on sensory data to make decisions onboard. We are exploring various types of sensors (ToF, LiDAR, mmWave, magnetometers, etc.), sensor fusion algorithms (EKF, CNN, etc.), and embedded systems (FPGAs, CPUs, and GPUs) to build a heterogeneous platform that maps the right operations to the right processor to achieve the real-time onboard constrains.
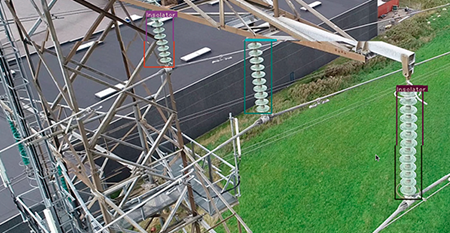
AI for Infrastructure Identification
The aim is to build and train AI algorithms to autonomously recognize the desired infrastructure for inspection. The trained AI network will be deployed on the drones’ onboard processor. Thus, we are measuring the efficiency of AI networks on various architectures to reach a smooth flight.
Disturbance Rejection
Interacting with energized cables is not an easy task especially when it comes to a drone. There are various types of disturbances; electromagnetic interfaces, environmental disturbance, and noises. We are building a novel drone system that mitigates the disturbance and utilize the interfaces to have better drone stability.

Drone Design
Integrating sensors and energy harvesters while mitigating disturbances need a customized drone design that reflects specifically on the application requirements rather than being generic. We are mechanically designing various airframes, joints, and moving parts to build a drone that hosts various units to accomplish its mission.
