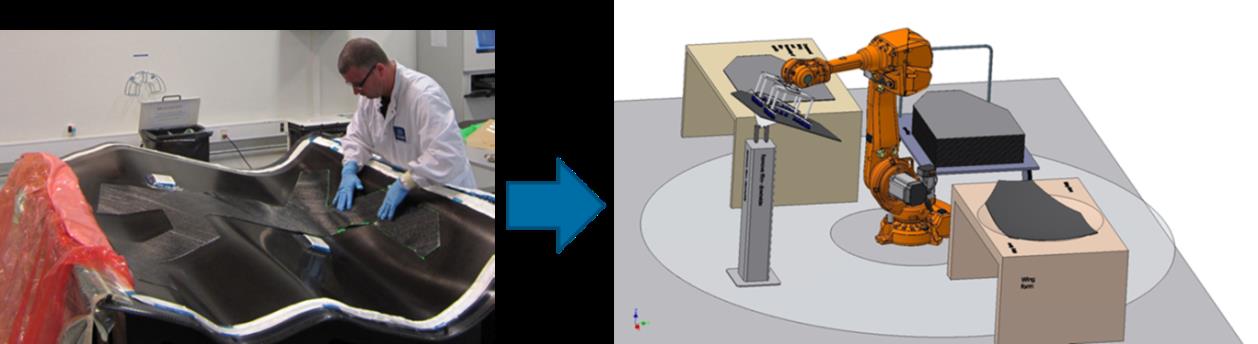
The usage of advanced composite materials based on glass and in particular carbon fibers is subject to more and more attention in a number of industries. In particular the aerospace and wind mill industries are using the materials, but the usage is also increasing in automotive and oil and gas industries. At Terma Aerostructures, they use pre-cut fiber plies, which are placed on a mold. The plies consist of pre impregnated fibers placed in a matrix resin and typically have a thickness of 0.1-0.2mm. They are placed layer by layer until the desired geometry is achieved. The manufacturing of products based on these materials is however challenged by lack of automatized production methods, and therefore the production is still manual. The high salary costs in Denmark therefore challenges the competitiveness in this new industry. The FlexDraper project will address this problem through automation.
The goal of FlexDraper is to develop a novel type of automation where layup of fiber plies and the resulting form creation is carried out by a robotic system. This leads to high demands to the mechanical design of the robot system and in particular the tool for draping the plies onto the mold. There are also high demands on the ability to model the layup process and to be able to use the models to predict the trajectories of the robotic system. Furthermore, the system must be able to handle flaws (e.g. undesired wrinkles) by detecting these with computer vision and so that the robot system automatically learns to correct the layup so that the flaws disappears. In addition to Terma Aerostructures and SDU, the partners in FlexDraper are Aalborg University, Technical University of Denmark, the robot systems integrator RoboTool, and the Netherlands Aerospace Centre.
The role of SDU is to develop a model and learning based robot programming tool for picking up the fiber plies and placing them correctly onto the form.
Contact:
Professor Henrik Gordon Petersen
Project Partners:
University of Southern Denmark, Denmark; Aalborg University, Denmark; Technical University of Denmark, Denmark; Netherlands Aerospace Centre, The Netherlands; Terma Aerostructures A/S, Denmark; Robo Tool A/S, Denmark